Project Goal
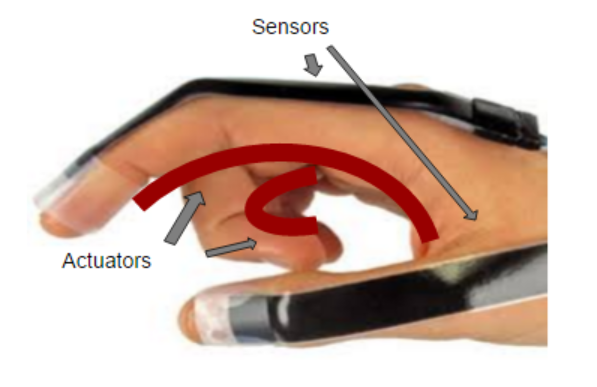
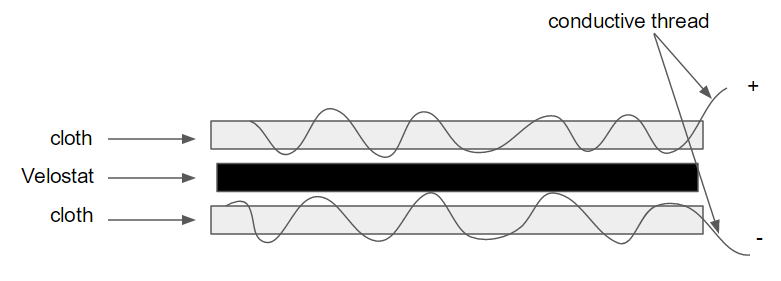
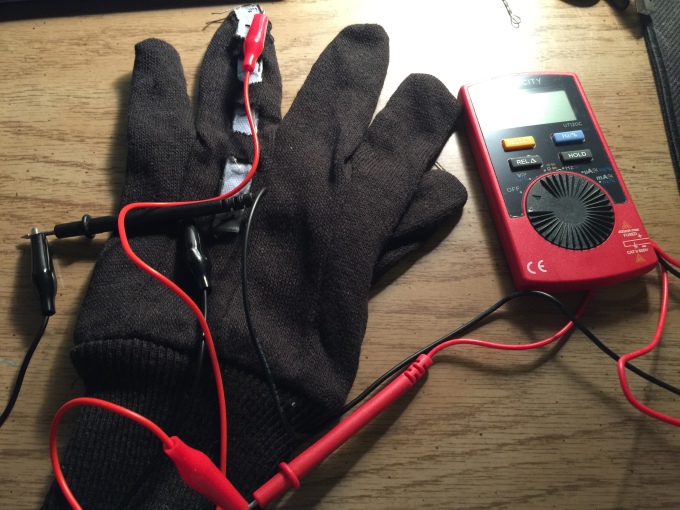
In this project, we designed a Smart Glove using Nylon Fishing Line as actuators and Velostat as sensors to help people who are unable to hold or grab things to move their fingers. Our work included literature review of Dielectric Elastomers, sensor design using Velostat, real time data processing using Arduino and Processing 3, noise cancellation, and artificial muscle fabrication using Nylon Fishing Line.
Noise cancellation using Kalman filter
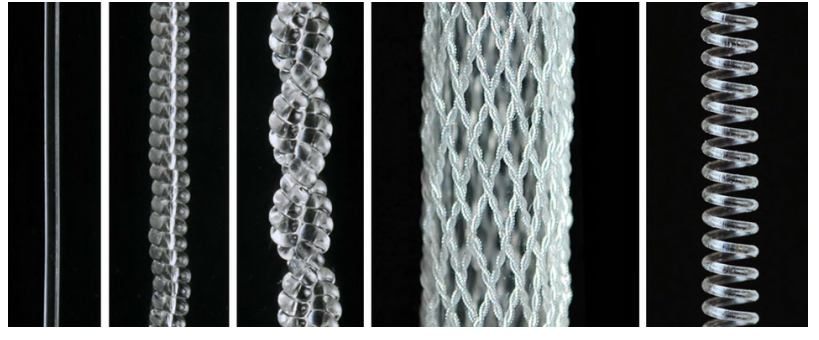
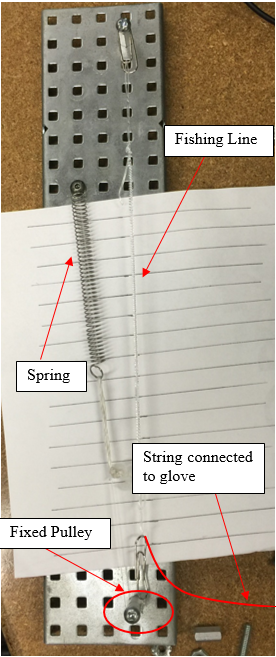
Artificial muscle – Nylon Fishing Line coiling
Artificial muscle – Nylon Fishing Line annealing