Project Goal
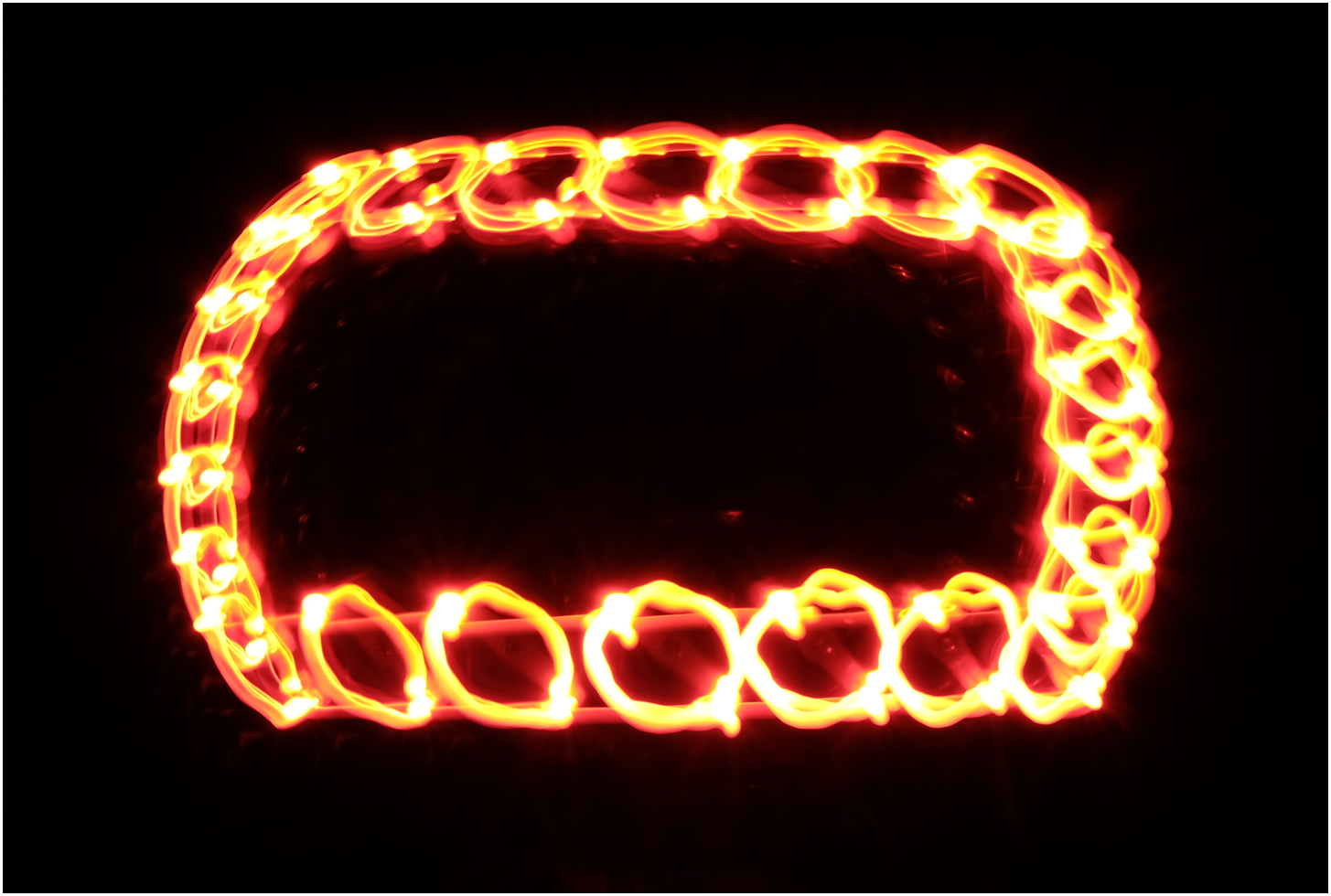
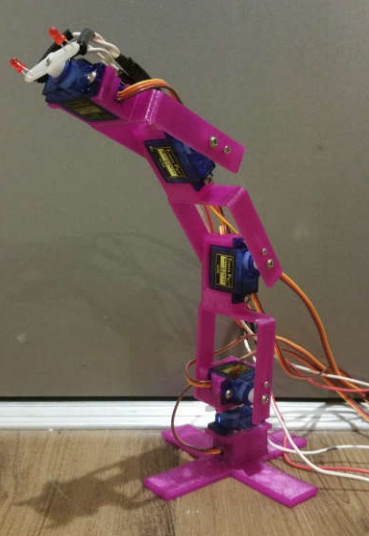
The purpose of this project is to design, simulate, print, construct, program and utilize a 5 DOF robotic arm for the purpose of creating “light painting” photographs.
In order to accomplish this, we made use of the full range of forward and inverse position and velocity kinematics. We designed, simulated, and realized end-effector trajectories to produce predictable and desirable final photographs, the nature of which would demonstrate mastery of the robot’s kinematics. This arm should be viewed as a prototype with potential future use as an educational tool in the teaching of robot kinematics and dynamics.
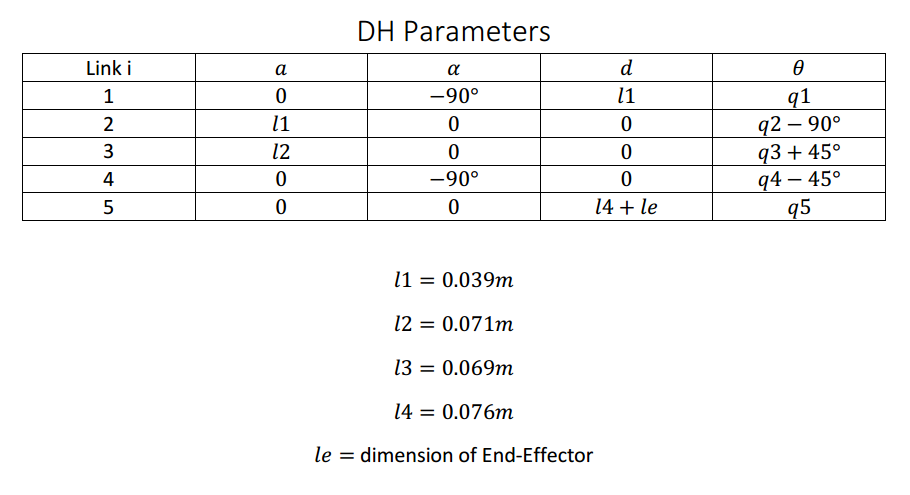
D-H Parameters
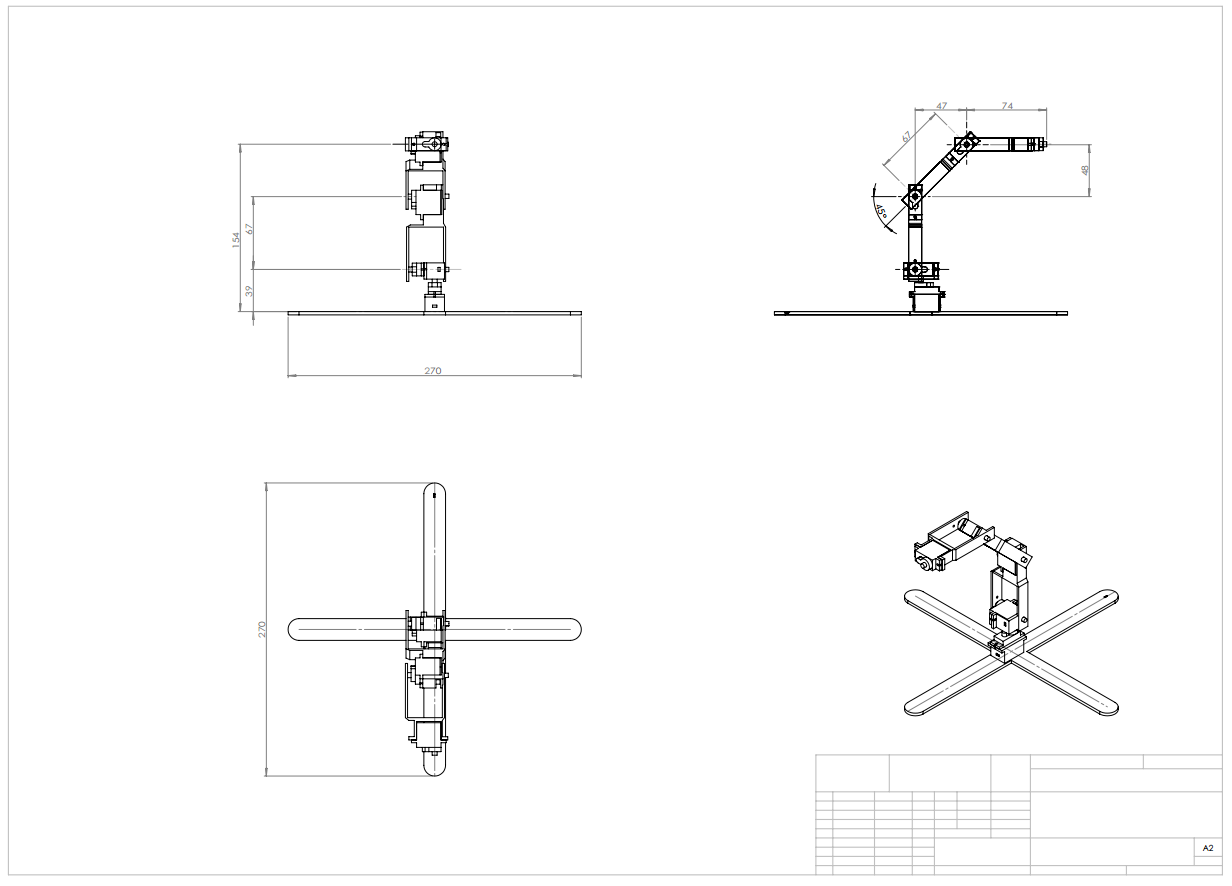
Mechanical Design in SolidWorks
Simulation Model (SimMechanics)
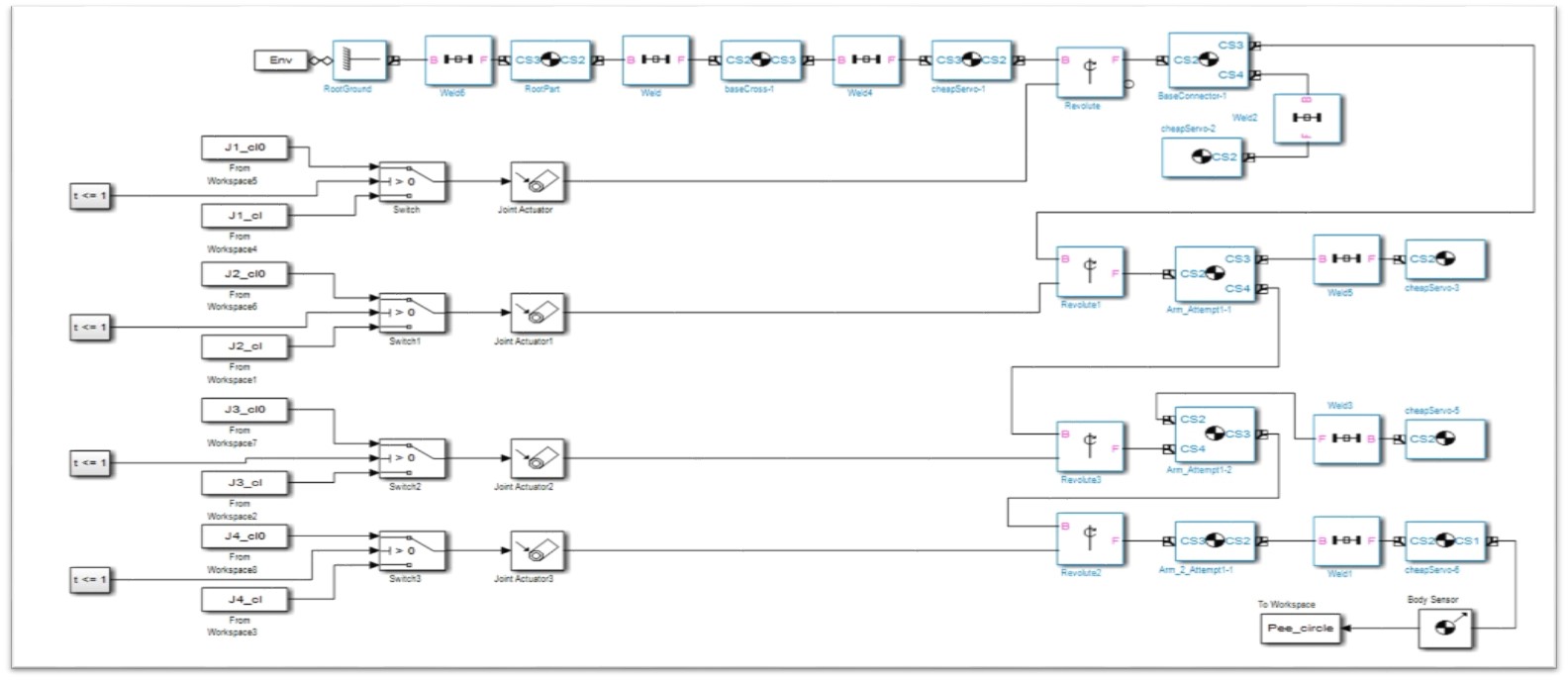
Simulation Input and Output
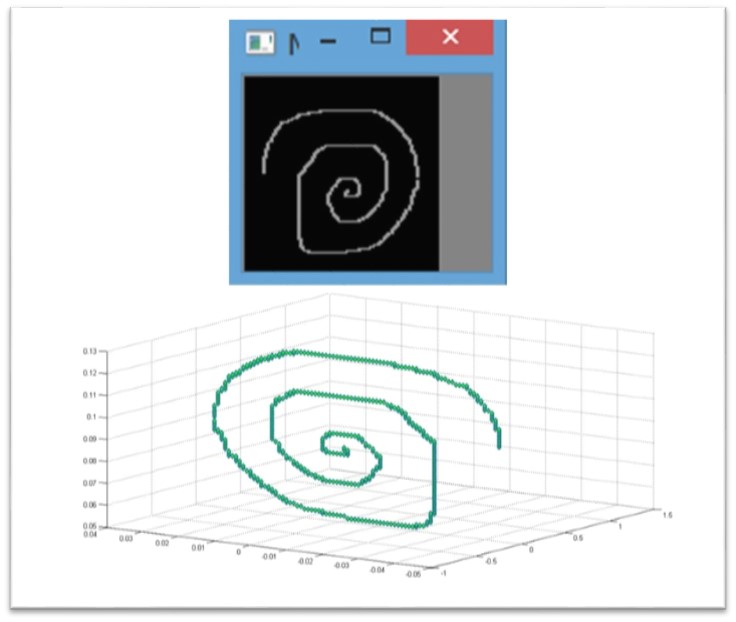
Light Printing Image